RoEL: Robust Event-based 3D Line Reconstruction
IEEE Transactions on Robotics (T-RO), 2026
Project Page / arXiv / Code
What is the best 3D representation for event cameras?
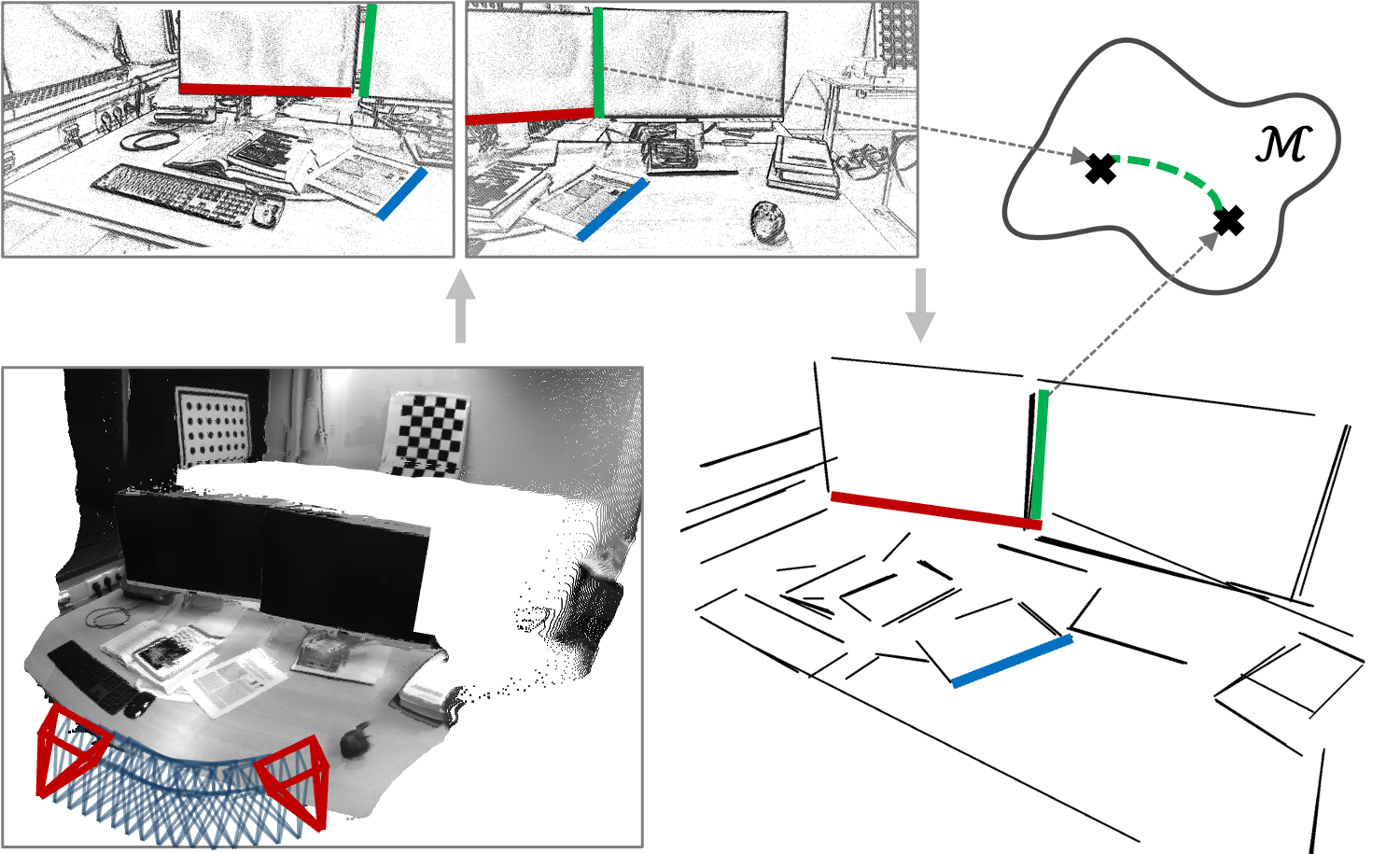
We introduce a correspondence-based 3D line reconstruction pipeline for event cameras,
from reliable correspondence search to Grassmannian optimization in 3D space.